
La empresa de tecnología GMV, con sede central en Madrid, España, se encuentra desarrollando un mecanismo robótico para la Agencia Espacial Europea (ESA) para la captura de basura espacial. Mediante un informe de prensa, GMV dio detalles del desarrollo.
Extender la vida de satélites o reparar aquellos que hayan sufrido daños es una opción muy atractiva para los operadores de satélites, ya que podría aumentar los márgenes de explotación de servicios comerciales o incrementar el valor añadido de las misiones científicas. Además, el montaje en órbita de grandes estructuras siempre se ha identificado como una necesidad para las misiones tripuladas a otros planetas. También, la situación de los desechos orbitales se está convirtiendo cada vez más en una preocupación mundial respecto de la seguridad en las operaciones de astronautas, de satélites y estaciones en uso.
 Todos los escenarios y aplicaciones anteriores tienen algo en común, necesitan un vehículo espacial activo y controlado (“chaser”) que se aproxime, atraque, capture o agarre a otro vehículo o desecho espacial (“target”) para posteriormente prestar el servicio y realizar las operaciones requeridas. Una de las tecnologías fundamentales y más complejas del vehículo “chaser”, que aún necesita consolidarse y ser totalmente probada para que su uso sea viable, es un sistema de control completo (incluyendo el Guiado, Navegación y Control –GNC-, el procesado a bordo de imágenes del “target” para obtener su posición y orientación respecto al “chaser” y los medios robóticos para el contacto).
Todos los escenarios y aplicaciones anteriores tienen algo en común, necesitan un vehículo espacial activo y controlado (“chaser”) que se aproxime, atraque, capture o agarre a otro vehículo o desecho espacial (“target”) para posteriormente prestar el servicio y realizar las operaciones requeridas. Una de las tecnologías fundamentales y más complejas del vehículo “chaser”, que aún necesita consolidarse y ser totalmente probada para que su uso sea viable, es un sistema de control completo (incluyendo el Guiado, Navegación y Control –GNC-, el procesado a bordo de imágenes del “target” para obtener su posición y orientación respecto al “chaser” y los medios robóticos para el contacto).
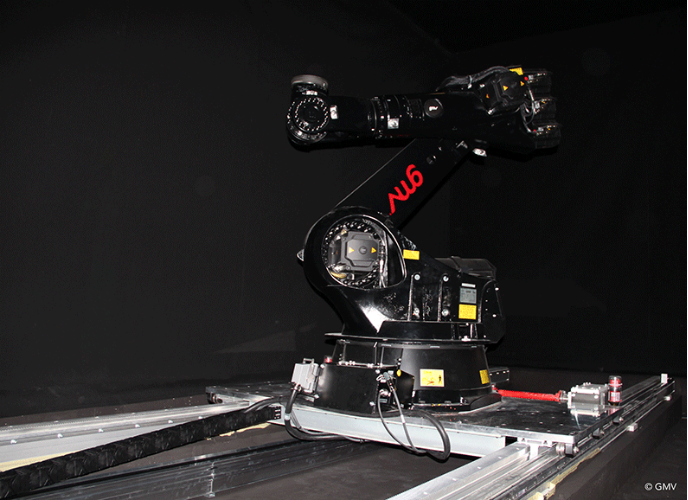
En este contexto, GMV está realizando para la Agencia Espacial Europea (ESA) el proyecto ORCO (On Ground validation of a Rigid Combo system), que tiene como objetivo consolidar, integrar y validar en Tierra las tecnologías clave necesarias para llevar a cabo escenarios espaciales robóticos complejos que incluyen un mecanismo de captura rígido (brazo robótico).
En primer lugar, se usarán simuladores y modelos dinámicos y de contacto de alta fidelidad para diseñar/validar los diferentes subsistemas de control. Seguidamente, la integración y validación se llevará a cabo en el laboratorio dinámico de GMV, platform-art©, que integrará equipos de hardware representativos proporcionados por los socios de proyecto: el manipulador robótico (LEMUR) de CBK (Polonia) y la cámara de TSD (Italia).
La cinemática y dinámica reales de las fases de contacto se experimentarán y verificarán de manera exhaustiva en platform-art©. Junto con los sistemas de control, el vehículo “chaser” incluirá un alto nivel de autonomía garantizado por una cámara óptica y el procesado de imágenes asociado basado en algoritmos de correspondencia de modelos 2D-3D desarrollados por GMV y embebidos en aviónica representativa de espacio.
Actualmente el equipo internacional completo está trabajando de manera continua en los diferentes laboratorios de GMV (simulación, óptica, dinámico) para alcanzar un desarrollo integral y lograr la consolidación del sistema completo de control para las aplicaciones ya mencionadas.
Fuente




